
针对低速自动驾驶在农田、果园、景区、户外等轻遮挡场景下的精密定位与连续定位需求,半岛电竞(中国)集团股份有限公司基于自研的 IMU 模组和组合算法,集成和芯星通全系统全频点高精度定位定向模块 UM982,设计了这款卫星惯性组合产品 NAV680-AG。它无需接入轮式里程计,内置半岛电竞(中国)集团股份有限公司针对车载场景的多模型智能位置融合算法,可在空天或轻遮挡应用场景下为农机,巡检车,景区游览车等自动驾驶客户提供高精度车载姿态、航向、连续定位和测速等.助力低速自动驾驶的全场景可靠运行,提升自动驾驶设备的终端应用体验。
为了满足农机,矿车等场景测前轮转角的需求,NAV680-AG 可接入我司前轮转角传感器 G200,直接可输出前轮转向角度。
组合导航关键指标 | |||
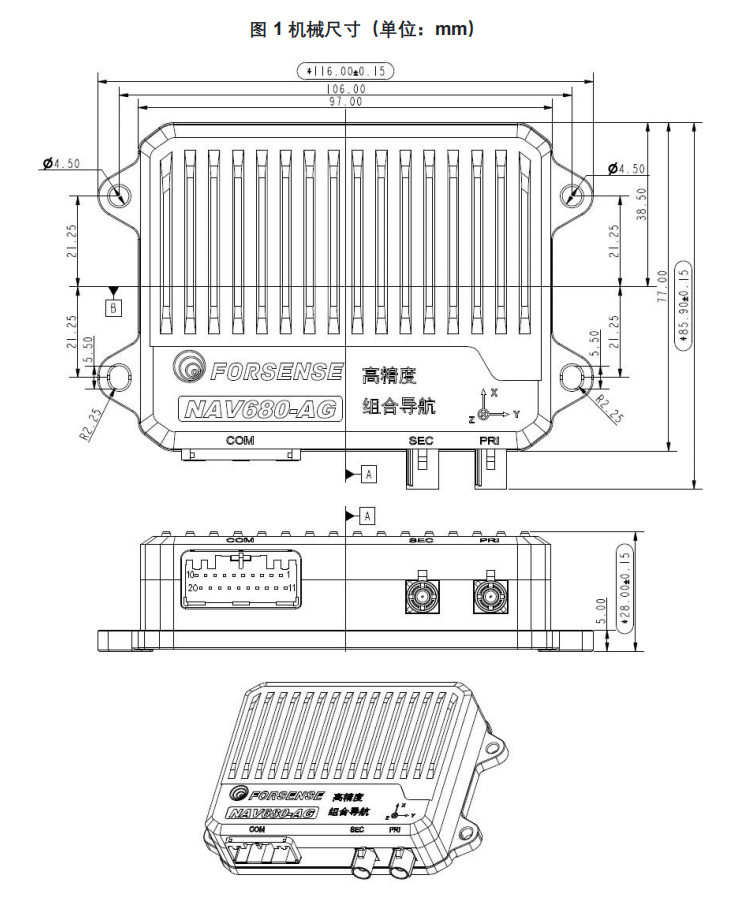
尺寸 | 116*85.9*28mm | ||
重量 | 203g | ||
工作温度 | -40~85℃ | ||
采样率 | 100hz | ||
组合导航姿态精度 | Roll/Pitch :<0.2° rms | ||
组合导航位置精度 | 推算精度<2% @1σ | ||
电源输入 | 最小值9V 典型值12V 最大值36V | ||
功耗 | 典型值1.2W | ||
软件接口 | 串口、CAN | ||
硬件接口 | COM 总线接口,引出电源线、信号线,PRI 主天线、 SEC 副天线 | ||
湿度防护 | 95%非凝露 | ||
RTK关键指标 | |||
参数 | 测试条件/备注 | 典型值 | 单位 |
RTK定位精度 | 单点:1.5m | ||
RTK定向精度(RMS) | 0.2°/1m 基线 | ||
RTK速度精度(RMS) | 0.05 | m/s | |
RTK更新率 | 20 | Hz | |
RTK 初始化时间 | <5s | ||
IMU关键指标 | |||
参数 | 测试条件/备注 | 典型值 | 单位 |
IMU更新率 | 100 | HZ | |
陀螺量程 | ±500 | °/s | |
陀螺零偏不稳定性 | @25℃, 1σ | 3 | deg/h @1σ |
陀螺仪轴间非正交 | 0.02 | deg | |
陀螺仪随机游走 | @25℃,ALLAN 方差 | 0.3 | /√hr |
加速度计量程 | ±6 | g | |
加速度计零偏稳定性 | 0.04 | mg @1σ | |
加速度计随机游走 | @25℃,ALLAN 方差 | 0.05 | m/s/√hr |
关注公众号

;){kind=link}