FSS-IMU614E-AG Single Antenna Integrated Navigation Module
IMU614E-AG Inertial Module uses data fusion algorithm of IMU and GNSS to achieve low cost, high precision, anti-magnetic interference orientation and attitude determination. At the same time, a unique front wheel angle estimation algorithm is built in to provide users with a stable and driftless front wheel angle. It is especially suitable for the single antenna controller scheme in the field of agricultural auto-driving.
Performance Index
Attitude Accuracy
Roll/Pitch :<0.2° rms
Heading:<0.3° rms
Update rate 100hz
Gyro Range ±500°/s
Gyro bias instability 6deg/h @1σ
Accelerometer range ±8g
Zero Bias Stability of Accelerometers 0.04mg @1σ
Output Protocol
Notes:
The accumulative sum check removes the sum of all bytes of the check bits for this frame.
The frame length is the total number of data bytes except for the header, frame ID, frame length, and check bits.
Small end mode, send low bytes first.
Input Protocol
It is recommended to send at least 20hz.If the user does not need the front wheel angle, there is no need to send the motor angle and the transmission ratio.
The accumulative sum check removes the sum of all bytes of the check bits for this frame.
The frame length is the total number of data bytes except for the header, frame ID, frame length, and check bits.
Small end mode, send low bytes first.
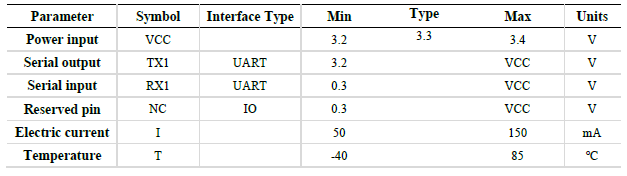
1. Electrical Characteristics
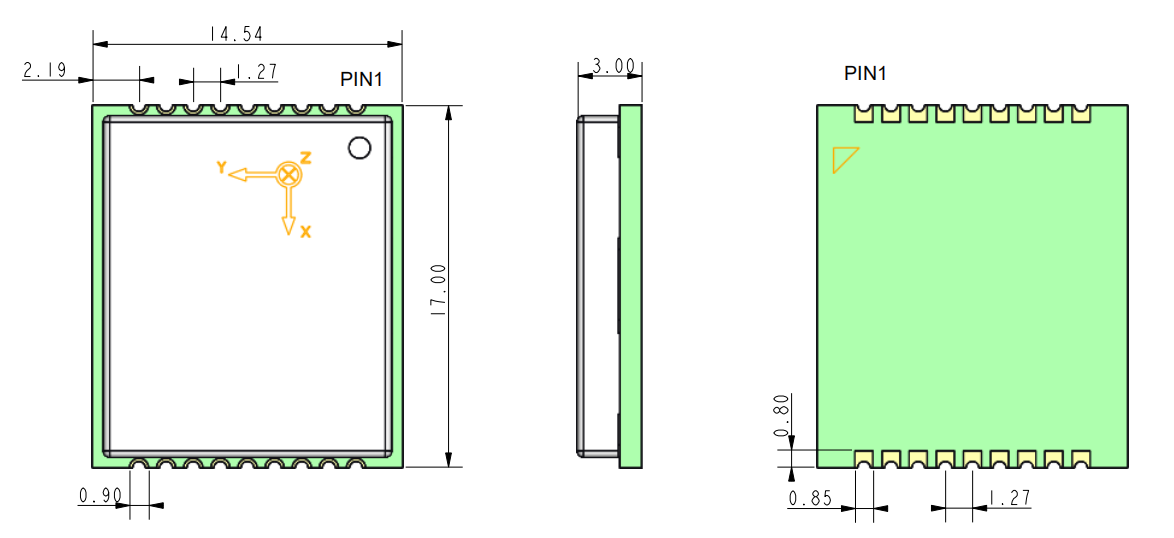
2. Shape structure
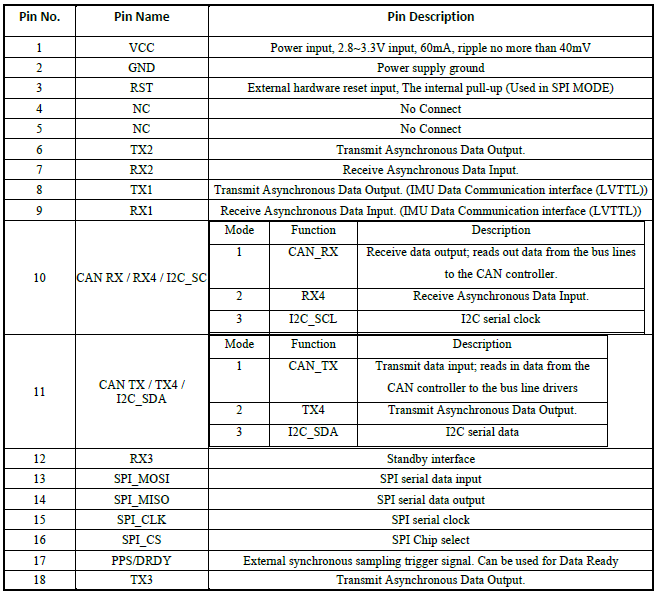
3. Pin Description